|
We established the chemical robotics group in 2000. The aim of the chemical
group goes beyond what is conventionally envisioned as robotics. To reach our
goals, we study robots not by utilizing mechanics or motors, but by utilizing
chemical reactions. We also study self-assembly and self-reproduction by
imitating self-organization in nature.
We have already developed chemical robots based on the BZ reaction. We have
also developed the self-reproduction of structures composed of various kinds
of parts, not by controlling the parts themselves but by controlling the
environment. Through these researches, we hope to better understand the
difference between robots and living creatures.
Researchers & PhD Students
Yusuke Hara
Shingo Maeda
Hiroki Shigemune
Graduate Student
Under Graduate Student
|
|
| Chemical Robot
 We realized a novel gel that can walk and generate peristaltic motion. The self motion is produced by dissipating chemical energy of oscillating reaction. Although the gel is completely composed of synthetic polymer, it shows autonomous motion as if it is alive. We realized a novel gel that can walk and generate peristaltic motion. The self motion is produced by dissipating chemical energy of oscillating reaction. Although the gel is completely composed of synthetic polymer, it shows autonomous motion as if it is alive.
|
|
| Adhesion control of gels
Functional gels have been extensively investigated for their potential in several application including drug-delivery system, chemical valves, and actuators. However, there is no study for constructing multifunctional gels by combination of the functional gels. Therefore, in this study, we challenged the establishment of the multifunctional gel by connecting the gels. As a result, we succeeded in connecting the gel with the same charged gels by utilizing the surface modification method.
|
|
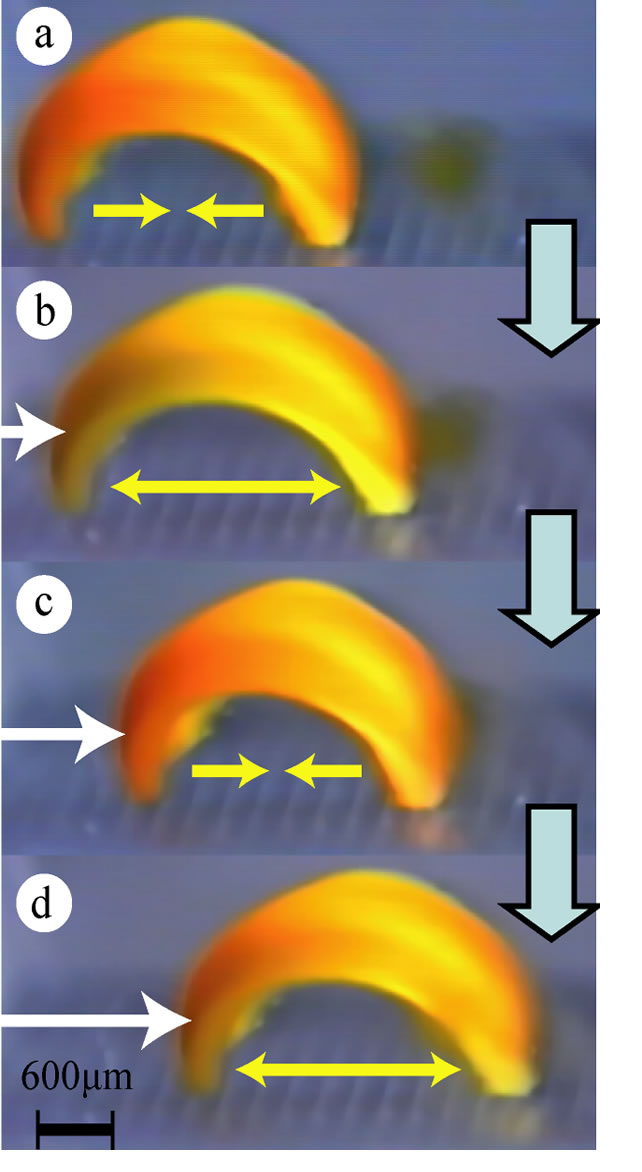
| Study on driving characteristics and mechanical strength of self-oscillating gel to realize a chemical robot
 We have researched the gel actuators that drive autonomously synchronized with the Belousov-Zhabotinsky reaction. In order to expand the application field, we modified the molecular design of the gel actuator for realizing the wide-range control of frequency and the high mechanical strength. Moreover, we investigated the influence of the external condition on the driving characteristics. We have researched the gel actuators that drive autonomously synchronized with the Belousov-Zhabotinsky reaction. In order to expand the application field, we modified the molecular design of the gel actuator for realizing the wide-range control of frequency and the high mechanical strength. Moreover, we investigated the influence of the external condition on the driving characteristics.
|
|
| Research on dielectric elastomers
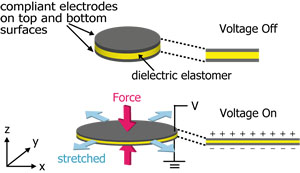
Biologically inspired robots are well realized by means of soft polymer actuators which actuate with expansion and contraction motion. We approach it through development of dielectric elastomer actuators, which show expansion in planar and contraction in thickness direction by the external electric field.
|
|
| A self-assembling method for polymer gel components

We have proposed a method for self-assembly of gel components under agitation. We utilized the electrostatic interaction between the ionic gels. We succeeded in demonstrating selective adhesion and precise positioning of the components through the design of component shape.
|
|
| Design of printed paper robot with organic actuator
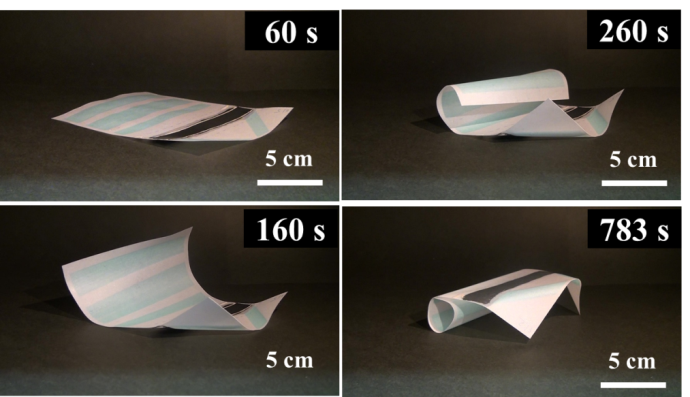
We have proposed a method for paper mechatronics that merges printed robots and paper electronics. We used a commercial ink jet printer for self-folding of paper. The paper is folded automatically along the printed line to make the robot body. The paper robot is equipped with a printed electro-thermal actuator. The experimental paper robot showed self-folding in 15 minutes to form the body and demonstrated a locomotion at 6.5 mm per step.
|
|
|




