|
Over the past two decades, the application of robotic and
machine technology has expanded from industrial use to residential
use. Advances in hardware and software computing have also
enabled sophisticated implementation, that covers not only
the motion control and the dynamic planning strategy but
also the learning and the sensorimotor coordination for
autonomous robots. Future machines and robots will be required
to interact with people in a dynamic and uncertain environment.
Regarding the information sharing among people and robots,
natural and intuitive multimodal communication, and the
active function of thinking and understanding people's feelings
are key subjects. On the other side, regarding the sharing
of physical action space, robots must ensure the safety
and precision of their motion, assuming physical contact
with people. With the improvements in information technology,
intelligent information processing has become a main issue
in many fields. Classical artificial intelligence has emerged
as the issue. The causality of implementation is described
as the logical rule. Symbols, signs, and language are used
as the explanation of knowledge. Modeling is the process
of describing the system in terms of mathematical equations.
Our laboratory is a member of Humanoid
Robotics Institute, and also a member of WABOT-HOUSE
Laboratory, and 21st Century COE Program, Waseda
University, "The innovative research on symbiosis technologies
for human and robots in the elderly dominated society"
(see web
site). Aiming at realization of human-collaborative
robot, we develop and study on fundamental technologies.
Moreover, for the realization of more flexible robots, we
established "Chemical reaction robot group (CR)"
since 2001. The reseach topics cover with humanoid roboti
interface, human interfaces, robot vision, telecommunication
devices, autonomous robot and chemical reaction robot.
Adjunct Researcher
Huei Ee YAP
Graduate Student
Jiarong Chen
Zhang Yu
Takahiro Sasaki
Shunpei Shimomura
Akihiro Hara
Nourhan Aloush
Undergraduate Student
|
|
|
Humanoid Robot "iSHA"
 We have been developing a humanoid robot "iSHA" (interactive Sys-tems for Humanoid Agent), which is designed to behave like and interact with humans. We implemented an intelligent robotic architecture, which integrates goal-oriented subsystems by taking into consideration the flexibility and scalability of the system. We have been developing a humanoid robot "iSHA" (interactive Sys-tems for Humanoid Agent), which is designed to behave like and interact with humans. We implemented an intelligent robotic architecture, which integrates goal-oriented subsystems by taking into consideration the flexibility and scalability of the system.
|
|
|
Indoor navigation of autonomous mobile robot using passive RFID

We present a novel method using the read time of an antenna from a RFID system to reduce the localization error of a mobile robot in an RFID navigation system. Using this approach, our passive RFID system is capable of estimating the robot's location and orientation more accurately without the use of external sensors, signal strength measurement, and a vision system. |
|
|
Tactile and Haptic Devices for Robots and Applications
The research aims are to realize an autonomous robot and a harmonized Human-Machine environment by utilizing tactile sensors, which will support the human daily tasks. Applications: 1st apply it to eliminate manual procedures for improving the safety in human work spaces. 2nd apply it for human-robot cooperation for moving an object together. 3rd Apply it to the humanoid robot foots for autonomously balancing and walking in various environments. In these applications, information about the involve objects or orientations are not required in advance. |
|
|
Wireless Sensor Network-based Navigation System
We propose an navigation system using wireless sensor network (WSN) nodes to construct a virtual potential field. The nature of WSNs allows for a system that supports navigation as well as providing the ability to interface with other hardware. The system has applications in robot and human navigation.
|
|
|
Incremental Development of a Passive Dynamics-based Walking Machine

We built a four-legged passive-dynamic walking machine with its inner and outer legs connected rigidly two by two, We conducted experiments with a magnetic-type, and with an active release-type knee-locking mechanisms. We performed a series of experiments in which we counted the steps the walker made while walking down an incline. The active release-type mechanism made an increased number of successful walks down the slope from which we concluded that the new active release mechanism is more reliable and easier to use and set up. |
|
|
Development of Crawler and Wheel Type Carrier Robot 'Dai-sha' Using the Load as an Interface

We proposed to use the load itself as a control interface. Strain gauges are equipped under the load rack of the robot to measure the force applied to the load by the operator. The robot is controlled so as to cancel out the applied force. Therefore the operator can control the robot intuitively by only push the load while holding. The developed experimental robot can operate on flat terrain and stairs safely. |
|
|
Planar inverted pole balancing using inertia flywheel
Acceleration of a rotational flywheel exerts torque to a system which could be used as an external force to alter the state of a system. In this research the controllability of an under actuated inverted pendulum in 2 dimensional space using flywheels is investigated. Two flywheels are used to provide counteracting torque to balance the inverted pole in both roll and pitch directions. A state feedback controller is used to control and stabilize the system.
|
|
|
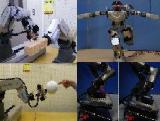
Autonomous Motion Generation with Fault Diagnosis Function for a Robot
based on Reinforcement Learning

As the structure and movement of robots is becoming more and more complex, programs become more complex, often requiring the laborious task of writing a section of program for each operation in a variety of
circumstances and detecting the broken part of the robot is also difficult because robots consist of many interconnecting parts. Therefore, we propose an autonomous motion generation along with fault diagnosis function is necessary to solve these problems.
|
|
|
Development of mouth interface controller for robotic arm manipulation

We developed interface to control a robot arm as our third arm. This interface is a controller device input by human mouse motion, because mouse is a body part having high degree of freedom next to hands.We controlled the actual robot arm using our developed interface.
|
|
|
Proposal of uneven terrain measure for mobile robot
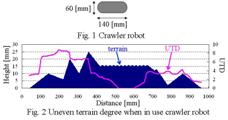
We propose the uneven terrain measure, named "Uneven terrain degree" (UTD) that is able to estimate mobility as well as selecting of path planning for mobile robot. The UTD is derived by the size and shape of the robot and geographical features. We examined the feasibility of the proposed UTD through a series of experiment with different uneven terrains and robots.
|
|
|
Development of a mobile robot with dodging control

In human environment, it is considered that the robots contact with or crush against humans or objects unexpectedly. These situations are dangerous not only for human but also robot itself. Moreover robot may fail in its task. In this study, we propose the robot is controlled to dodge the external force to cope with the problems of the sudden contacts and collisions. And we developed robot which takes a dodging motion in such a situation while tracking the planned route.
|
|
|
Development of a high efficiency Energy-Self-Sufficient Underwater Robot

Solar-powered Autonomous Underwater Vehicles (AUVs) are one approach that has been utilized to address the problem of energy consumption in AUVs. However, their duty cycle is often short due to their charging algorithms or low efficiency, making them impractical. To solve these drawbacks, we have developed an algorithm which decides whether the robot should operate underwater or charge on the water surface and have used a buoyancy control engine, known as a high efficiency method.
|
|
|
Framework for Task Attainability Assessment of Robot

Since their introduction, robots have played an important role in the manufacturing industry. As such, many researches have been conducted with a focus on efficiency. However, these researches often assume that the robot is capable of completing assigned tasks, which could result in damage to their output or even themselves. We propose a method which analyzes the feature space of available robots' functionality in order to determine if the required task can be completed.
|
|
|
Development of a Lightweight Manipulator with Constraint Mechanism
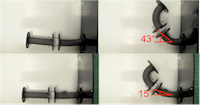
Hyper redundant manipulators are an interesting solution to applications requiring complex manipulations. While these types of manipulators can be used in complex environments, often their weight becomes impractically heavy due to the large number of actuators. In this paper we present an initial prototype, lightweight, joint-less manipulator using springs. From these results we proceeded to develop a movement restriction mechanism using a Magnetorheological (MR) elastomer. Experiments were also conducted with this prototype movement restriction mechanism in order to assess its advantages and disadvantages. Finally, we discuss how these results will be used for further improvements in the future. |
|
|
Development of Haptic Display Using Voice-Coil-Type Tactor

In situations where a robotic system is under the direction control of a user, such as tele-operation, conventional control methods generally require the user to have visual information about the robots position and motion. However, there are numerous applications in which this is either difficult or impossible. In order to facilitate the control of a robot without visual information, we developed a haptic display by utilizing voice-coil-type tactors that vibrate at specific frequencies and amplitudes according to the robot’s state. We began by investigating the detectable resolutions of vibration frequencies and amplitudes of our system along a human’s upper and lower back. We then evaluated our prototype using a two-link, planar robot arm in simulation. |
|
|
Intraoral Interface Using 9-DOF IMU

Many assistive technologies have been developed to extend the capability of humans to complete different tasks. Assistive devices such as intraoral interfaces, devices inserted into mouth, are particularly useful given our rich facial muscle abilities. In this paper, we present a novel multipurpose intraoral interface which aims to extend human's manipulation ability. Our intraoral interface consists of an inertial measurement unit (IMU) mounted on a stick attached to a ball joint. The user manipulates the stick using their tongue, and so is hands-free. The stick's orientation data is measured and translated into control commands. An additional IMU mounted on the head is used to compensate for head and body movement. Separate experiments to control a mouse pointer and an electric wheelchair were conducted to evaluate the performance of the proposed interface. The effectiveness of our proposed method as compared to conventional inputs is reported and discussed.
|
|
|




