|
The research on neural network covers many fields such
as machine learning, neural computation, parallel distributed
processing, natural intelligent systems, connectionism.
The system is modeled on the human brain, and aims at solving
problems by simple processing with a number of units called
neurons, each neuron is connected each other with the weighted
links that represents the strength of connection.
In the past decades, a number of learning models have been
introduced and employed to solve many problems such as classification
problems, pattern recognition, data mining. We are doing
theoretical research such as neural networks and the genetic
algorithms, and applying these to the multimedia system
and robot control.
Invited Researcher
Shingo Nakamura
Graduate Student
Under Graduate Student
|
|
| Machine learning via Hybrid method.

It is difficult to apply machine learning method to actual machine directly because of huge learning cost. In this research, I propose the strategy using simulator constructed by NN to obtain the optimal controller, and the simulator is built by the actual hardware.
|
|
| Hierarchical Temporal Memory Algorithm
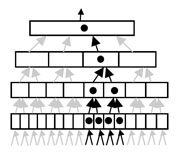
We study, implement and advance Hierarchical Temporal Memory algorithm for the use in stereoscopic image recognition and robot control. The algorithm is based on a human brain theory. Presently, the algorithm is applied for single camera image recognition. The experimental results show that the algorithm can recognize rotated, zoomed and distorted images to certain level. The goal is to advance the algorithm so that it can be reliably used for robot stereoscopic vision with acceptable level of robustness and generalization by objects recognition. The correct recognition of objects in the robot's world is essential for intelligent control of its autonomous behaviour.
|
|
| A Proposal of a Sensor-network to Communicate with Meaning for Construction of IRT(Information & Robot Technology) System
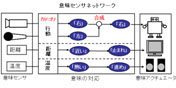
We have developed new IRT component, by unifying the information that is used among IRT(Information & Robot Technology)component as a "meaning" which is a result of some information processing. To compose a sensor-network by combining this IRT component, we propose a new method of IRTsystem-construction. This enables to connect each IRT component directly and new IRT component without redesigning a IRT system from the beginning again.
|
|
|