|
環境を制御することで,自己組織的に動作する機構を研究するために、ケミカルロボティクスグループを発足した。(2000年)
自然の自己組織化を参考にした3次元自己組立法,および化学反応を利用して運動エネルギーを得る試みとして,ケミカルロボットに関する基礎研究を行っている.
自然の自己組織化を参考にした3次元自己組立法についても検討を行っている.これまで,分散型モータの自己組立及びその制御・3次元物体の自己組立について成果を得ており,現在実際の回路組立などへの応用を試みている.
自己複製や自律駆動といった生物特有の機能を持つロボットを実現させることは従来のロボットでは非常に困難であると考えられます.我々は一般的な機械システムではなくマテリアルに基礎を置いて生物に近いロボットを実現しようとしています.具体的には以下の様な研究を進めています(東京大学吉田亮研究室と共同研究).
| ■ |
生体環境下で駆動する新規自励振動型高分子 |
| ■ |
自励振動ゲルアクチュエータ |
| ■ |
高分子ゲルの接着制御 |
| ■ |
自律歩行ゲルロボット |
| ■ |
誘電エラストマーアクチュエータの開発 |
研究員・博士課程
原 雄介
前田 真吾
重宗 宏毅
修士課程
学部生
|
|
| 自律歩行ゲルロボット
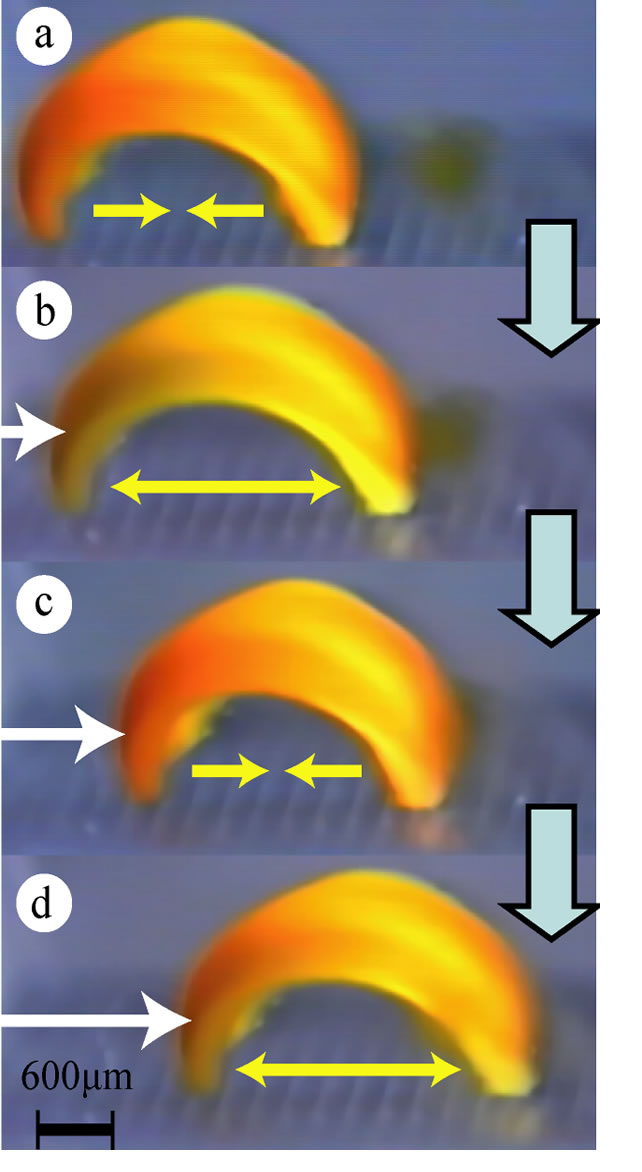 振動化学反応を高分子ゲルとカップルさせることで、周期的な膨潤・収縮運動を生成することができる。このゲルの網目に異方性やミクロ相分離構造を導入することで、自ら歩くゲルや蠕動運動を実現することに成功した。 振動化学反応を高分子ゲルとカップルさせることで、周期的な膨潤・収縮運動を生成することができる。このゲルの網目に異方性やミクロ相分離構造を導入することで、自ら歩くゲルや蠕動運動を実現することに成功した。
|
|
| 高分子ゲルの接着制御
機能性ゲル同士を組立てることにより、多機能性を有するゲルを創製する研究はこれまでほとんど報告がなかった。本研究では、ゲル同士を接着によって組み立てることにより多機能化を目指した。
|
|
| 自励振動ゲルアクチュエータの適用可能範囲の拡大
 分子設計を見直すことで駆動可能な周期範囲の拡張や強度の改善を目指している。これまでに駆動周波数を20倍程に改善することに成功している。最終的には自律遊泳ロボット等のアクチュエータの実現を目指している。 分子設計を見直すことで駆動可能な周期範囲の拡張や強度の改善を目指している。これまでに駆動周波数を20倍程に改善することに成功している。最終的には自律遊泳ロボット等のアクチュエータの実現を目指している。
|
|
| 誘電エラストマーアクチュエータの開発
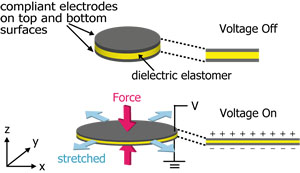
生物の筋肉のように,ソフトで直接伸縮運動するアクチュエータを用いることで,より生物に近いロボットの実現が可能である.電圧を印加すると電界と水平方向には縮み,主直方向に伸びる特性がある誘電エラストマー型アクチュエータの開発を行っている.
|
|
| 静電相互作用による高分子ゲル部品の自動組立

ゲル部品を水中撹拌下で自動的に組み上げる手法を提案している。複数のイオン性ゲル部品を水中撹拌下で確率的に出会わせ、部品間の静電引力により組み立てる。また部品形状を工夫することで、選択的接着と部品間の位置合わせの実現に成功した。
|
|
| 有機アクチュエータを用いた印刷法による紙ロボットの製作
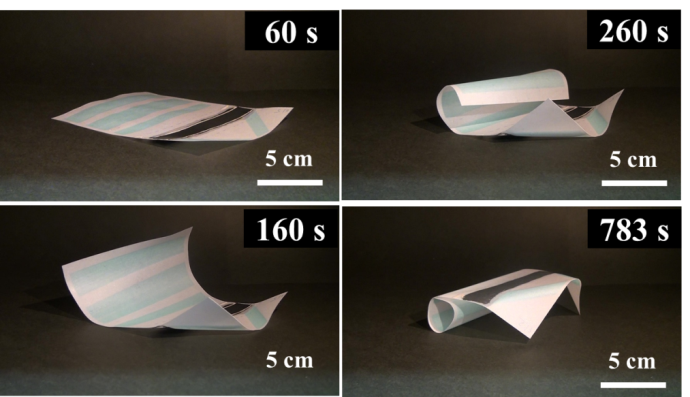
本研究では,紙を基板とするロボットを印刷法によって作製するペーパーメカトロニクスという分野を提案する.ロボットの構造形成には,家庭用インクジェットプリンタを用い,高揮発性インクを印刷することで印刷パターンに沿って自動的に紙が折れ曲がり,立体構造形成が行われる.駆動には樹脂の熱膨張を利用した3層型電気熱アクチュエータを設計した.結果としてペーパーメカトロニクスのプロトタイプとして,15分で立体構造形成を行い,1サイクル辺り 6.5 mmで駆動する紙ロボットの作製に成功した.
|
|
|




