|
従来のキーボード,モニタ,スイッチなどに加え,音声,音楽,画像などのチャンネルによるマルチメディアインタフェースの重要性が議論されています.このようなインタフェースを通じたマルチモーダルコミュニケーションとは,視覚,聴覚,触覚,嗅覚,味覚に代表される人間の感覚を通じ,画像,音響,言語,身振り,表情などの様々なモダリティ(様式)を統合した,情報の複合的なやりとりと言えるでしょう.これまで,右に示されるような統合型マルチモーダルプラットフォームの構築,および要素技術に関する研究を行ってきています.
ロボティクス班では,環境認識、動的制御、インターフェース、行動アルゴリズムなどといった、人間共存型ロボットの実現に必要な基礎技術の研究を行っています.早稲田大学ヒューマノイド研究所に参加し、人間型ロボットの認識システムの構築を行っています.また、早稲田大学WABOT-HOUSE研究所、および21世紀COEプログラム『超高齢社会における人とロボット技術の共生』においてプロジェクト研究を行っています.
|
■ |
人間型ロボットの制御系システムの設計・構築・実装 |
|
■ |
自律移動ロボットのナビゲーション |
|
■ |
強化学習によるロボットの動作獲得と故障診断 |
|
■ |
口腔内動作を用いたロボットアーム制御インタフェース |
|
■ |
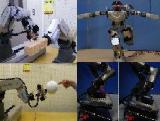
積荷をインターフェースとしたクローラ・車輪併用型搬送ロボットDai-Shaの開発 |
|
■ |
ロボットに対する地形評価基準「不整地度」の提案 |
|
■ |
いなし行動を有する経路移動ロボットの開発 |
嘱託研究員
ヤップ フェイ イー
修士課程
陳 佳栄
チョウ ユー
佐々木 貴裕
下村 駿平
原 昭洋
ノウルハン アルーシュ
学部生
|
|
|
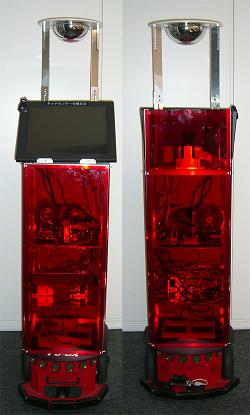
ヒューマノイドロボット
"iSHA"
 人間とロボットとの自然なコミュニケーションのあり方を研究するためのプラットフォームとして開発されたロボットです。これらからの刺激に対してiSHAは物や人物を追跡したり、音に合わせてダンスしたり、体を軽く押したり、握手して引っ張ったり、音声や音によっても行動する、生き物のようなロボットの実現を目指しています。 人間とロボットとの自然なコミュニケーションのあり方を研究するためのプラットフォームとして開発されたロボットです。これらからの刺激に対してiSHAは物や人物を追跡したり、音に合わせてダンスしたり、体を軽く押したり、握手して引っ張ったり、音声や音によっても行動する、生き物のようなロボットの実現を目指しています。
|
|
|
Passive RFIDを用いた自律移動ロボットのナビゲーション

環境中に埋め込まれているRFIDの位置情報からロボットの自己位置と姿勢を推定する。その際、RFIDタグを読み取った時間を用いてナビゲーションを行う『Read time model』を提案している。 |
|
|
Tactile and Haptic Devices for Robots and Applications
The research aims are to realize an autonomous robot and a harmonized Human-Machine environment by utilizing tactile sensors, which will support the human daily tasks. Applications: 1st apply it to eliminate manual procedures for improving the safety in human work spaces. 2nd apply it for human-robot cooperation for moving an object together. 3rd Apply it to the humanoid robot foots for autonomously balancing and walking in various environments. In these applications, information about the involve objects or orientations are not required in advance. |
|
|
Wireless Sensor Network-based Navigation System
We propose an navigation system using wireless sensor network (WSN) nodes to construct a virtual potential field. The nature of WSNs allows for a system that supports navigation as well as providing the ability to interface with other hardware. The system has applications in robot and human navigation.
|
|
|
Incremental Development of a Passive Dynamics-based Walking Machine

We built a four-legged passive-dynamic walking machine with its inner and outer legs connected rigidly two by two, We conducted experiments with a magnetic-type, and with an active release-type knee-locking mechanisms. We performed a series of experiments in which we counted the steps the walker made while walking down an incline. The active release-type mechanism made an increased number of successful walks down the slope from which we concluded that the new active release mechanism is more reliable and easier to use and set up. |
|
|
積荷をインターフェースとしたクローラ・車輪併用型搬送ロボットDai-Shaの開発

積荷をインターフェースとした搬送ロボットの制御手法を提案する。これにより、階段走行時でも安定的な駆動が保障され、操作性の高いインターフェースの創製が期待できる。また、モバイルベースは平地・階段走行可能な車両を開発した。 |
|
|
Planar inverted pole balancing using inertia flywheel
Acceleration of a rotational flywheel exerts torque to a system which could be used as an external force to alter the state of a system. In this research the controllability of an under actuated inverted pendulum in 2 dimensional space using flywheels is investigated. Two flywheels are used to provide counteracting torque to balance the inverted pole in both roll and pitch directions. A state feedback controller is used to control and stabilize the system.
|
|
|
強化学習によるロボットの動作獲得と故障診断

近年のロボットは、動作や構造が複雑になっているため、様々な動作をプログラムすることや故障時に故障箇所を発見することが難しくなっている。そこで、ロボット自身で動作を獲得し、故障時にもその箇所を自身で発見するロボットの研究を行っている。 |
|
|
口腔内動作を用いたロボットアーム制御インタフェース

本研究では人間の身体動作を拡張することに着目し,人間が3本目の手を所持することで従来の動作範囲では不可能であった新たな行動や作業を創出することを目的とする.そこで人間の口腔内の高い自由度に着目し、口腔内動作をインタフェースとしたロボットアームの制御手法を提案する. |
|
|
ロボットに対する地形評価基準「不整地度」の提案
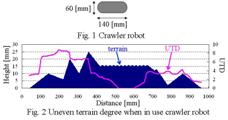
環境に適したロボットの選択や経路計画を実現するために,ロボットの走破性を評価する上で重要となる新しい地形の評価基準「不整地度」の提案をする.実験を行いその有効性の実証を行っている
|
|
|
いなし行動を有する経路移動ロボットの開発

人間環境でのロボット運用のためには,突発的な接触や衝突への対応方法が必要となる.本研究では対応方法の1つとして外力をいなすロボット制御を提案し,外力をいなしながら経路移動を行うロボットを作製した.
|
|
|
高効率なエネルギー自給型水中ロボットの開発

太陽電池によりエネルギーを自給し、長期間の動作を行う水中ロボットが従来開発されている。しかし動作時間に比べ充電時間の割合が大きいという問題がある。
本稿ではこの解決のため、日照量や時間帯に応じて充電、動作の判断を行うことで充電効率を高めるアルゴリズムや、浮力調整機構により浮沈の力を推進力へ変換するエネルギー効率の高い駆動方法を搭載したエネルギー自給型水中ロボットを製作し充電、動作効率の改善を図る。
|
|
|
ロボットのタスク達成可能性評価

高機能ロボットにタスクを与える際,そのロボットがタスクを達成するに十分な能力を有しているかを判定することが必要である.本稿ではロボットを動かした際に得られる各部位の軌跡からロボットの各部位の稼動域である特徴空間を作成し,特徴空間内で作成された空間上での経路探索問題を解く事により,物体運搬やナビゲーションのタスクを与える際にロボットの達成可能性を検証する.
|
|
|
運動制限機構を用いた軽量マニヒ?ュレータの開発
近年、複雑に入り組んだ環境での運用において高自由度マニピュレータの研究が進められている。高自由度マニピュレータには、多数のアクチュエータを搭載しているため重量が著しく増加してしまうという問題がある。
本稿では、バネと紐を用いて大域的な動作が可能なマニピュレータを設計し、またその運動を一部制限する機構によって大域的な運動を細かな運動に変換することでアクチュエータを増やすことなく自由度を向上させる事を図る。
|
|
|
ボイスコイル型振動子を用いたハプティックディスプレイの開発

従来のロボット操作では,ロボットを目視で確認している必要があるため,遠隔操作等の目の届かない場所での操作が困難であった.そこで我々は目の届かない場所にあるロボットの形や位置などの状態を把握するために,ボイスコイル型振動子を用いたハプティックディスプレイの開発を行っている.そのために本稿では人間の振動周波数,振幅に対する分解能について調査し,ハプティックディスプレイを開発してその性能を調査した結果を報告する.
|
|
|
9軸姿勢センサを用いた口腔内インタフェース

我々は機械による人間の身体拡張システムを研究している。そのようなシステムを考えた際、インタフェースによって、拡張する身体の本来の自由度を失わないようにする必要がある。本研究では9軸姿勢センサ(IMU)によって口腔内動作を検知する新しい手法を提案し、小型で身体拡張に適したハンズフリー口腔内インタフェースを開発した。
|
|
|




